Why Robot Cables Fail in High-Complexity Motion Applications
By Shizu Yamaguchi
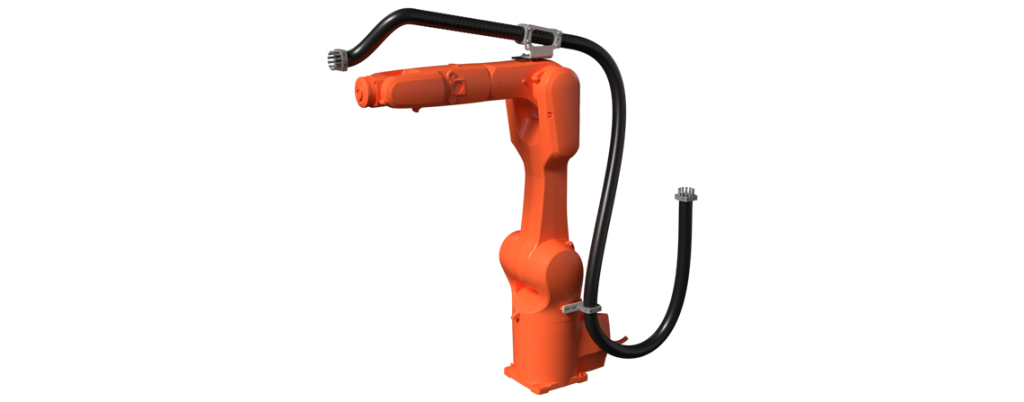
Industrial robots are evolving rapidly. Modern systems operate at higher speeds, execute more complex paths, and handle increasing payload demands. In automotive and other manufacturing environments across Canada, it is now common to see six-axis robots running dozens—if not hundreds—of programs within a single production cycle.
While mechanical and control systems have advanced significantly, cable management is frequently treated as an afterthought. Traditional cable management systems, such as loosely bundled dress packs or conduit tubing, were never designed for this level of dynamic, multi-directional motion.
The result is predictable: rising cable failure rates, increased maintenance interventions, and costly unplanned downtime.
What Makes Modern Robotic Motion More Complex?
Multi-axis movement
Six-axis robots introduce simultaneous motion across multiple joints, each contributing to cumulative stress on cables. Axis 4, 5, and 6—particularly in wrist assemblies—are exposed to compound torsion and bending, often in confined spaces.
Multi-program operation
Unlike fixed, repetitive automation, modern robots frequently switch between different tasks. Each program introduces a unique motion path, meaning cables are subjected to variable, non-repetitive stress patterns. This variability significantly reduces predictability in cable wear.
Higher articulation demands
As integrators optimize floor space, robots are required to perform more aggressive articulation within tighter envelopes. Increased rotation angles, sharper bends, and more frequent reversals all contribute to accelerated fatigue.
In essence, complexity introduces more variables than traditional cable systems are designed to handle.
Common Failure Points in Robotic Cable Systems
Torsion
Torsional stress—often referred to as corkscrewing—is one of the most common failure mechanisms. When cables are not properly guided, rotational motion causes them to twist along their axis. Over time, this leads to internal conductor fatigue and eventual failure.

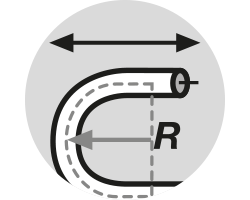
Bend radius violations
Every cable has a minimum bend radius. When routing does not control a cable path, repeated bending below this threshold introduces micro-fractures in conductors and insulation. These failures typically manifest after extended operation, making them difficult to predict.
Abrasion
In unmanaged systems, cables often contact adjacent surfaces, tooling, or each other. Continuous friction wears down insulation, exposing conductors and increasing the risk of short circuits or signal degradation.
Snagging
Cable loops or excess slack can catch on fixtures, tooling, or the robot structure itself. Even minor snagging events can introduce sudden, high-impact loads that can irreversibly damage cables.
Early Warning Signs Engineers Often Miss
Twisting
Visible twisting or spiralling along the cable length is a clear indicator of torsional stress. However, this often goes unaddressed until failure occurs.
Jacket wear
Surface abrasion—flattening, thinning, or cracking of the cable jacket—signals excessive contact or improper routing. Early detection can prevent more severe internal damage.
Inconsistent robot movement
Subtle irregularities in motion, such as hesitation or positional drift, may indicate signal degradation caused by cable damage. These symptoms are frequently misattributed to control or mechanical issues.
Recognizing these warning signs early requires deliberate inspection and an understanding of cable behaviour under dynamic loads.
What Reliable Cable Management Requires
Controlled guidance
Cables must be guided along defined paths that accommodate the robot’s full range of motion. This prevents uncontrolled twisting, excessive bending, and interference with surrounding components.
Defined motion paths
An engineered system ensures that cables move predictably, even in multi-program environments. Consistency in motion reduces stress variability and extends service life.
Engineered strain relief
Proper strain relief is essential at connection points, particularly near the robot wrist. This minimizes load transfer to critical interfaces and protects against fatigue-induced failure.
In high-complexity applications, cable management must be treated as a system-level design consideration—not a peripheral detail.
A Smarter Approach: Multi-Axis Cable Carriers
As robotic systems continue to push the limits of speed, articulation, and flexibility, the limitations of conventional dress packs become increasingly apparent. This is where engineered solutions such as triflex® multi-axis cable carriers come into focus.
Unlike traditional cable routing methods, triflex systems are specifically designed for multi-axis robotic applications. Their modular construction enables controlled motion in three dimensions, allowing cables to follow the robot’s path while maintaining defined bend radii and eliminating torsional stress.
From an engineering standpoint, the advantages are clear:
- Torsion-free guidance reduces internal conductor fatigue, a primary cause of premature cable failure in six-axis robots.
- Consistent bend radius control ensures cables operate within manufacturer specifications, even under aggressive articulation.
- Enclosed routing architecture minimizes abrasion and prevents external interference, particularly in dense or high-speed cells.
- Integrated strain relief and mounting solutions protect critical connection points, especially in wrist-mounted applications where failures are most common.
In North American automotive and general manufacturing environments—where uptime, predictability, and maintenance reduction are key performance metrics—such systems are increasingly viewed not as an accessory, but as an investment in reliability.
Conclusion
Robotic systems are becoming more capable, but also more demanding. Increased speed, articulation, and program variability are placing unprecedented stress on cable infrastructure.
Traditional cable management approaches cannot keep pace with this level of complexity. Without controlled routing, defined motion, and engineered strain relief, failure is not a matter of if—but when.

For engineers and integrators, the implication is clear: as robotic complexity increases, so too must the sophistication of cable management strategies. Solutions like triflex multi-axis cable carriers represent a shift toward engineered reliability—transforming cable management from a chronic risk factor into a controlled, predictable component of robotic performance.